Practically all modern stepper drivers can operate in a so called microstepping mode where the mechanically fixed step positions (usually 200 per rev) are electronically subdivided into a number of microsteps.
Have you set it?
This library runs on Arduino Uno and Mega2560, but for the prototype a the larger memory / faster processor SparkFun Redboard Turbo was used. Sufficient exact for this purpose.
With the tick-exact execution of commands, the synchronization will not be lost as long as the command queues are not running out of commands.
No driver board or stepper motor is need to run this example. Of course the loop latency will be increased by the extra code you add to read the sensors and calculate the new set speed. I also am going to change my source, maybe is not providing enough power to the motor. Negative values of the setMaxSpeed parameter will rotate the motor in the opposite direction. Try something like this, perhaps: Hello jwatte.
VMOT ========> POWER-12V 3A
I do not know how much until I increase, however would like more, something in 1000 or 2000 RPM. This allows precise control of the stepper, if the code, generating the commands, can cope with the stepper speed (beware of any Serial.print in your hot path). allows up to 200000 generated steps per second ? 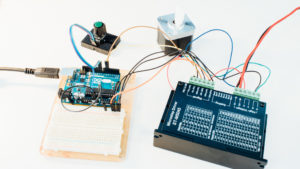
UNO, Mega)Connect the GND, STEP, DIR pins to the microprocessor GND and the step and dir output pins.No other connections are necessary to drive the motor.
The position of the stepper is tracked by counting the number of steps (pulses).
The required pulse rate \(r\) can be calculated by: \[r = 16\cdot \frac{200\,\text{stp/rev} \cdot 1200\,\text{rev/min}} { 60\,\text{sec/min}} = 64000\,\text{stp/sec},\].
See the speedStepperProfile example sketch. See the SpeedStepper.h file for the various library methods available.
In both modes, pulse rates of up to 300000 steps per second are possible. In addition, the pulse counter module is used starting from unit_0 to unit_5.
The following code starts a rotation of two motors.
Some info is Issue #86.
supports up to four stepper motors using Step/Direction/Enable Control (Direction and Enable is optional), allows up to 50000 generated steps per second, supports up to six stepper motors using Step/Direction/Enable Control (Direction and Enable is optional). Thank you for ask my question. This will create a directory pio_dirs, which contains all examples. To run the SpeedStepperSetup sketch for real you will need a stepper motor, driver and power supply and in this example SparkFun Redboard Turbo.
 The simavr is an excellent simulator for avr microcontrollers.
The simavr is an excellent simulator for avr microcontrollers.
Means the position will count: Enable pin sharing: the common pin will be enabled for as long as one motor is running + delay off.
Then in that window pressing a cmd key sends it immediately.
11 - runs the stepper to position 1000000 and back to 0. 2A ===========> WIRE BLUE e.g.
How do you have your stepper motor connected to the driver?
There is an issue with the esp32 mcpwm: as soon as the mcpwm timer is running, on every cycle an interrupt is serviced - even though no interrupt is enabled. This speedStepperPlot sketch uses millisDelays to time switching between various speeds and accelerations. For coordinated movement of two or more axis, the current ramp generation will not provide good results.
You should update the sketch to include a call to invertDirectionLogic() in the setup to fix this for the next run. The stepper latency measures the maximum delay between successive calls to the stepper.run() method. Do not use or redefine this variable. A note to MIN_CMD_TICKS using mcpwm/pcnt: The current implementation uses one interrupt per command in the command queue.
3.3V =========> N / C Hello Ben.
Settings for STEP and DIR pulse polarity. speed remained the same. The module defines the global variable fas_queue. That is 10x slower then for the UNO. Supported are avr (ATmega 328, ATmega2560), esp32, esp32s2 and atmelsam due.
By changing the inputs to MS1/MS2 you can switch between 1/8, , and full steps.
This project shows how to use the SpeedStepper library in a practical application. VDD =========> N / C
I am using an engine Minebea 23km-C051-07V Step Motor Hybryd 1.8DEG 56 NEMA23 size of 9.9 kgf / cm with a source 12V, 3A and an Arduino Mega 2560. For 1000 steps / sec the run() method must be called at least every 1ms.
Compatibility with ESP32-C3: Not supported currently.
This sets how fast you can process new sensor measurements and adjust the motor set speed. Really the change that you made in the code, increased speed of motor, I think of to increase more. The h command can then be used to return to 0 and the cmd use to move if reveres to the position the motor at the minus limit. The delays due to the print statements was removed by using pfodBufferedStream above, but to process the user's input you need to take the just first char of the input and ignore the rest of the line. For the third time, what do you have your A4988 current limit set to? you can be more specicif please?
Thus the pulse counters cannot be used as lower 16bit of the position, unfortunately. You can change the output pins to any digital output by changing the STEP_PIN and DIR_PIN settings near the top of the sketch. Every motor will adhere to its auto enable delay, even if other motors already have enabled the pin.
GND =========> GND (arduino) (This message is taking place of the original comment).
The acceleration setting is always a +ve number. Stepper Speed Profiles are made up of an array of SpeedProfileStruct, which is defined in the SpeedStepper.h file. To power this stepper you need a power supply of 12V or more and greater than 350mA. USB A to Micro cableUSB to TTL Serial CableArduino IDE V1.8.9 and a computer to run it on.SpeedStepper librarypfodParser library for the nonBlockingInput and pfodBufferedStream classes millisDelay library for non-blocking delays. The esp32 task uses 4ms delay, while the avr repeats every ~4 ms at 16 MHz and atmel sam due every 2ms at 21MHz. For longer time between pulses, pauses without step output can be added.
Thanks gagank1 for esp-idf integration by adding CMakeLists.txt (, Thanks clazarowitz for the amazing atmel sam due port (. These examples use D6 and D7 as outputs. Already tried everything i could not make it rotate faster.
Then when you use the 'goHome' command the motor will overshoot the home position. timer module 3 add to platformio.ini under build_flags: For arduino users, the same can be done by defining the flag before including the FastAccelStepperEngine.h header (as per info ixil), but apparently to issue #50, this approach does not work for everyone:
stepper #1 stops, then stepper #1's delay off counter is started.
For users of platformio, the used timer can be changed to either 1, 3, 4 or 5. So there are chances, that this lib works. Programming the Redboard Turbo is problematic. Can you post your code? Powered by Discourse, best viewed with JavaScript enabled, Acceleration for high-power-stepper-driver-arduino, NEMA 23 Stepper Stalling With Tic Controller, Tic T500 + #2267 = "slow" speeds only (2700rpm), Issue about Distribution Enough Current For Motor, Tic controller with two motors in parallel, Increasing the speed of a stepper motor using the A4988 and, http://www.robocore.net/modules.php?name=GR_LojaVirtual&prod=362. With rmt the below (multi-axis application) mentioned loss of synchonicity at high speeds can be avoided. Hello Ben.
This means stepper #1 uses the enable pin as High Active and stepper #2 the same pin as Low Active. ENABLE =====> N / C
Have you read that?
Summarizing: Moving one motor at 100kHz generates a processor load of about 10% for a T3.6 and some 28% for a T3.2. Choosing the appropriate MS1/MS2 settings allows you to adjust for installed gear ratio between the motor and the driven part. If the interrupt load is not an issue, then rmt is the better choice. To estimate the generated processor load we need to know the time it takes for handling acceleration, Bresenham algorithm and switching the STEP and DIR signals.
Here a short snippet showing the usage of the stepper class.
The maximum speed for this and the limits menu is set by the MAX_SETUP_SPEED at the top of the setupMenus.cpp. These examples use D6 and D7 as the Step and Direction outputs. First, set it to the lowest setting of the potentiometer.
These defaults are also the absolute hard coded speed limits the library will accept for setMaxSpeed() and setMinSpeed().
Install the libraries used for running the SpeedStepperPlot, above, and then also install the pfodParser library.
If you need to re-position the stepper to its true 'home' position, enter the p command to display the SET HOME menu. I didnt understand your first question.
The 'run' menu allows you to increase and decrease the speed, freeze at the current speed, stop and also return to home.
Here it is set to drop any extra chars when the buffer is full so that the sketch is not blocked waiting for Serial to send chars.
Already tried setting the MS1, MS2 and MS3 according to the table on page 6 of the A4988 datasheet, already made several modifications in the arduino code shown below, already used a font adjustable to provide a higher voltage, but not getting success.
=> Perhaps best to not use enable on delay, If the stepper is configured for delays for direction change, then one pause is added to the command queue for each direction change together with a step.
The StepControl class is used to actually move the motors to their target positions.
When stepper #1's counter is finished, then the FastAccelStepperEngine will ask all steppers, if they agree to stepper #1's disable request.
Open the Examples SpeedStepper speedStepperPlot example sketch, this sketch produces the above plot using the Arduino Serial Plotter and is an example of running a prescribed speed profile for example if running a pump.
Need further investigation, but till now haven't found the root cause.
connected to shift register) and, only esp32 derivates: the direction pins, No float calculation (use own implementation of poor man float: 8 bit mantissa+8 bit exponent). See the Latency section below. This counter counts in the range of -16383 to 16383 with wrap around to 0.
You must have Arduino available as a component. About page 29 and 30 of datasheet this true I forgot answer for Ben, but I already read it and I tried use all information.
SLEEP ======> N / C Compatibility with ESP32-MINI-1: At least mcpwm and pulse counter modules are listed in the datasheet.
No issue with 16 microstep.
But not.
esp32: This can be any output capable port pin. I am currently using a source of 12V, 3A.
DIR =========> PWM (arduino) Link to the stepper motorhttp://www.robocore.net/modules.php?name=GR_LojaVirtual&prod=362
Please check the examples for application and how to use the low level interface.
This is much less interrupt rate than for avr.
The turn on delay is minimal MIN_CMD_TICKS. While the SpeedStepper library allows you to set position limits on the motor movement, the tacking of the position is done by counting the steps output by the software. A CMakeLists.txt is provided to use FastAccelStepper as an ESP-IDF component. There are a few main ways to increase your maximum step speed: By the way, it looks like the datasheet for your motor has a lot of generally useful information on stepper motors on pages 29 and 30.
What do you have the A4988s current limit set to? This instructable is also available online at Stepper Speed Control Library for Arduino, To run the example sketches only an Arduino UNO or Mega2560 and the software libraries are needed, For bench testing of the library a SparkFun Redboard Turbo was used with an Easy Driver, a 200 steps/rev, 12V 350mA stepper motor and a 12 DC supply 2A or larger, e.g. The AccelStepper library provides more driving options which could be copied to this library if required. The stepper motor driver has a configurable current limit. Did you make this project?
When the motor reaches the speed you want you can stop the acceleration with any other key (or an empty input).
Have you read that?
Use the + cmd to start moving the stepper forward, if you find it moving in the wrong direction enter a non-command or just an empty line to stop it and then use the scommand to swap the direction of Forward.
Open the Examples SpeedStepper speedStepperPlot example sketch (Restart the IDE if necessary).
See issue #5.
On start up the acceleration is set to 1.0 steps/sec/sec.
Lets extend our example by another transport module (motor M3) which can move left / right only.
The library is able to handle synchronized as well as independent movement of up to 4 groups of up to 10 motors to their target positions. Three example sketches are provided, each of which can be run without a motor or motor driver. TeensyStep is a highly efficient Arduino stepper motor library compatible with the PJRC boards Teensy 3.0, 3.1, 3.2, 3.5 and 3.6.
On the other hand calling the stop() method will set the speed to zero and decelerate the motor to a stop.
port interrupts connected to noisy/bouncy switches causing bursts of interrupts. So the engine will call Stepper #2's, The stepper queue will on initial start, if configured, add pauses to the command queue to implement enable delay.
Two coil stepper motors have 4 wires.
The library is tested with different kind of tests: These tests focussing primarily the ramp generator and part of the API, simavr based for avr (sub folder ./tests/simavr_based).
Can be executed by e.g. Initially the motor is stopped at position 0.
In this mode the steppers can be rotated using fixed rotation speeds.
If e.g. high speed Closed Loop nema 34 12nm stepper motor, esp32 FastAccelStepper, SBH860H driver, Stepper motor at 1500RPM with ESP32 and A4988, DIY 3 AXIS CAMERA SLIDER | MOTORIZED CAMERA SLIDER, NEMA 17 Servo: Final Accuracy Test & New Speed Record!!
When the limits are set use the x cmd to return to the SETUP menu and then you can use the r cmd to open the RUN menu. The actual times were measured with a logic analyzer, the processor load was calculated for various conditions and processors. The results roughly fit to the difference in the clock frequency of both boards. 2ms after the last step. i.e. What the documentation does not mention: All those reference values are only forwarded to the actual comparator on pulse counter reset.
Calling setSpeed(50.0) will cause it to start accelerating in the +ve direction to a maximum speed of 50 steps/min.
The overrun pulses will then be run at the former command's tick rate.
The speed of rotation and to have around 120 RPM.